检测到您当前使用浏览器版本过于老旧,会导致无法正常浏览网站;请您使用电脑里的其他浏览器如:360、QQ、搜狗浏览器的极速模式浏览,或者使用谷歌、火狐等浏览器。
 下载Firefox
下载Firefox
检测到您当前使用浏览器版本过于老旧,会导致无法正常浏览网站;请您使用电脑里的其他浏览器如:360、QQ、搜狗浏览器的极速模式浏览,或者使用谷歌、火狐等浏览器。
下载Firefox
成果受到国家863项目“多模态仿生两栖机器人机构设计与运动控制 ”支持。通过机构创新和系统集成,以仿鱼推进技术为基础,辅以轮、桨、鳍一体化推进机构,研制具有快速游动性能、强大的环境感知功能及良好的水陆环境适应能力的两栖服务机器人。
主要成果如下:
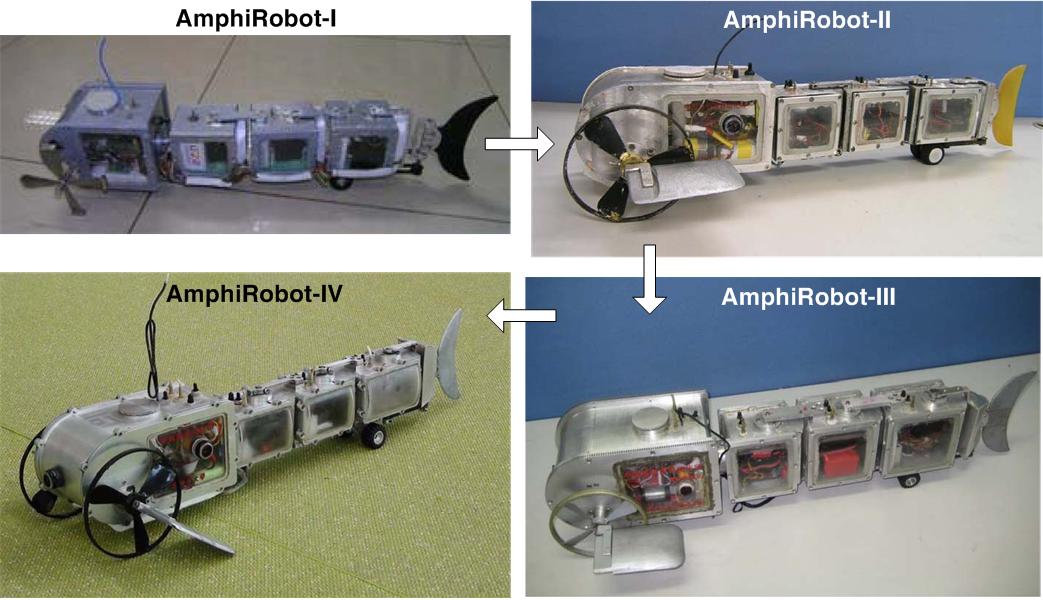
1.提出了一种以仿鱼游动和仿轮式运动为水下、陆地主要驱动方式,以爬行和仿海豚运动为辅助运动形式的多模态两栖机器人方案,设计了胸鳍复合驱动机构。试制了四代具有模块化结构的机器人样机,取得了良好的运动效果。
2.针对多模态两栖机器人特有的细长体结构,提出了一种可变构型转弯方法。利用仿鱼推进单元可偏离机器人纵向中线的特点,改变驱动轮桨和被动轮的相对位置关系,形成瞬时转动中心,实现地面机动运动。
3.结合两栖机器人的身体结构和运动特征,构建了基于非线性振荡器的链式中枢模式发生器(Central Pattern Generator, CPG)网络模型,分析了振荡器间的耦合关系。提出了具有不同阈值的关节饱和函数,实现了摆动部长度、摆动频率和幅度的协调控制,以及控制参数的在线实时计算。
4.制定了包含转弯量化强度的细化规则库,实现了两栖机器人地面和水下避障控制;利用转体机构,实现了仿鲹科鱼类游动和仿海豚游动的过渡;结合陆地和水下运动模态,提出了水陆环境变化时的模式切换策略。